【AGV驱动轮减震悬挂系统常见形式】
AGV移动机器人是机器人家族中的一个重要的分支,也是进一步扩展机器人应用领域的重要研究发展方向。自上世纪九十年代以来,人们广泛开展了对机器人移动功能的研制和开发,为适应各种工作环境的不同要求而开发出各种移动机构。其中【凤凰动力】电驱动-舵轮可以实现高精确定位、原地调整姿态和二维平面上任意连续轨迹的运动,具有一般的轮式移动机构无法取代的独特特性,对于全向移动机器人的自由行走具有重要意义。
通常情况下AGV底盘配轮采用3轮结构【单驱动】、4轮结构【双驱动】、5轮结构【单驱动】、6轮结构【双驱动】,采用辅助万向轮和驱动轮搭配的方式,辅助万向轮起到承载和从动的作用,驱动轮主要起到牵引和驱动的作用。
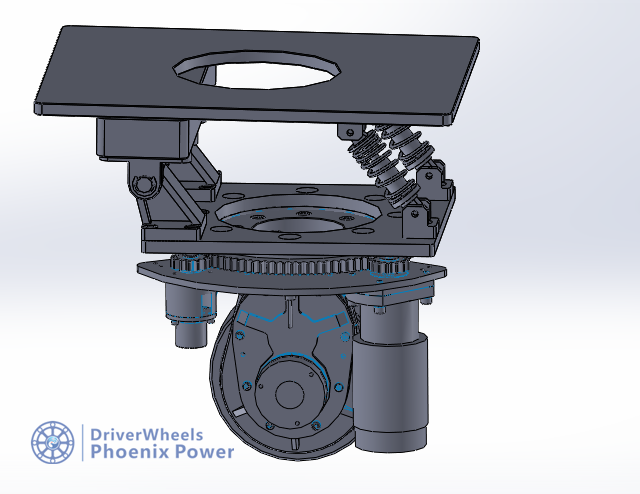
【方案一】
在AGV的作业环境中,路面的不平会导致驱动轮悬空或打滑,致使AGV失去动力或被顶起。减震悬挂缓冲装置结构中的弹簧会使驱动轮始终与地面贴紧,遇到凸起路面时,由于驱动单元的浮动性以及弹簧的可压缩性,可避免驱动单元带动AGV整体被顶起。弹簧的反作用力使驱动轮始终与地面贴紧,地面也时刻提供驱动轮牵引所需的摩擦力与附着力,保证了AGV不会因路面不平而失去动力。
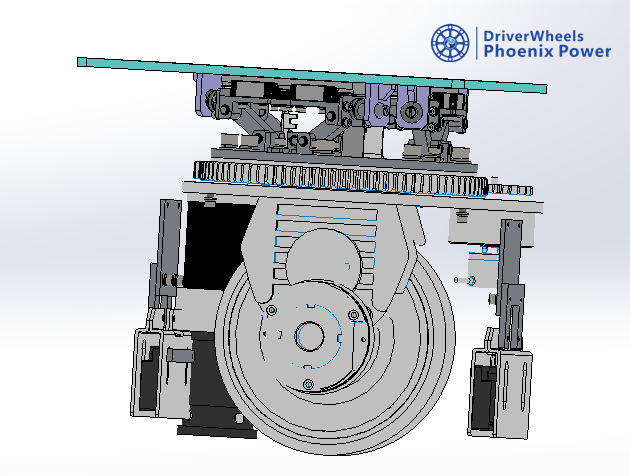
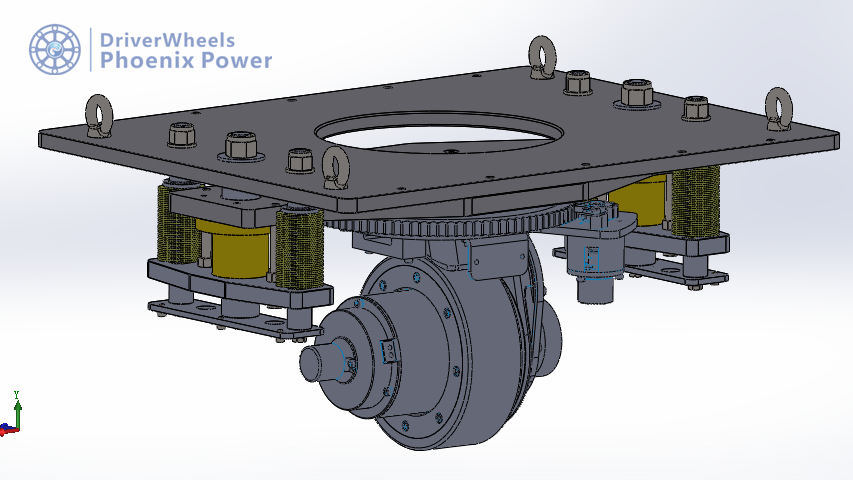
【方案二】
AGV驱动舵轮的减震悬挂缓冲系统结构主要是解决AGV在复杂路面上行驶的适应性,使得底盘轮系共同着地,避免因地面不平整带来的驱动轮悬空或附着力不够出现主动轮打滑的现象。













 粤公网安备 44010602004358号
粤公网安备 44010602004358号