来自OmniTact的各种物体的触觉读数。从左到右:M3螺丝头,M3螺纹,带数字4 3 9的密码锁,印刷电路板(PCB),无线鼠标USB。所有图像均从面朝上的相机拍摄。

来自OmniTact的触觉读数在齿轮架上滚动。当传感器旋转时,OmniTact的多向功能使齿轮齿条保持可见。
在整个设计过程中,我们的主要目标之一是使OmniTact尽可能紧凑。为了实现这一目标,我们使用了具有大视角和短焦距的微型相机。具体来说,我们选择了通常用于医疗内窥镜的摄像头,这些摄像头的尺寸仅为(1.35 x 1.35 x 5 mm),焦距为5 mm。如下图所示,这些摄像机被布置在3D打印的摄像机支架中,这使我们能够最大程度地减少传感器表面上的盲点,并将传感器的直径(D)减小到30毫米。
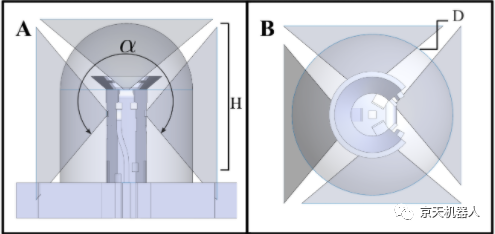
此图像显示了传感器内部的5台微型相机的视场和布置。使用这种布置,可以有效地使大多数指尖敏感。在垂直平面(如A所示)中,获得 270° 敏感度。在B水平面中,除视野之间的小盲点外,可获得360度的灵敏度。
我们证明,可以利用OmniTact的多向触觉感应功能解决具有挑战性的机器人控制问题:仅根据多向触摸传感器提供的信息将电连接器盲目插入墙上的插座(如下图所示)。这项任务具有挑战性,因为它需要将电连接器相对于抓手定位,并将抓手相对于壁装插座定位。

为了学习插入任务,我们使用了一种简单的模仿学习算法,该算法根据来自OmniTact传感器的触觉图像来估算将插头插入插座所需的末端执行器位移。通过使用键盘控制来控制机器人,我们的模型仅进行了100次插入演示。通过运行受过训练的策略获得的成功插入显示在后面的视频中。
如下表所示,与仅使用传感器中的一个摄像头相比,使用我们传感器的多向功能(顶部和侧面摄像头)可实现最高的成功率(80%)触摸感应确实对于解决该任务至关重要。我们还将性能与另一种多方向触觉传感器OptoForce传感器进行了比较,后者的成功率仅为17%。

紧凑,高分辨率和多方向触摸感应技术有可能改变当前机器人操纵系统的功能。我们相信,除了诸如外科手术中的机器人遥操作以及海上和太空飞行任务之类的应用之外,多方向触觉传感可能是通用机器人操纵中的重要元素。
将来,我们计划使OmniTact变得更便宜,更紧凑,从而使其可用于更广泛的任务。我们的团队还计划进行更多的机器人操纵研究,以为下一代的触觉传感器提供信息。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号