对于一个1000 × 1000的输入图像而言,假设采用上一节所讲述的每个神经网络都和前面一层的所有神经元相连的前馈神经网络(全连接神经网络),如果下一个隐藏层的神经元数目为10^6个,则输入层和隐含层之间的权值参数有1000 × 1000 × 10^6 = 10^12之多,如此数目巨大的参数几乎难以训练。在卷积神经网络中,为了减少权值参数的个数,提出了局部感受野(local field)这一概念。一般认为,人对外界的认知是从局部到全局的,图像的空间联系也是局部的像素联系较为紧密,而距离较远的像素相关性则较弱。因而,每个神经元其实没有必要对全局图像进行感知,只需要对局部进行感知(也就是说,神经元没有必要和下一层的所有神经元相连,只需和下一层的部分神经元相连),然后在更高层将局部的信息综合得到全局信息。如果采用局部连接,假设隐藏层的每个神经元仅与图像中10 × 10的局部图像相连接,那么此时输入层和隐含层之间权值参数数量为10 × 10 × 10^6 = 10^8,与传统的前馈神经网络相比,参数个数直接减少4个数量级。
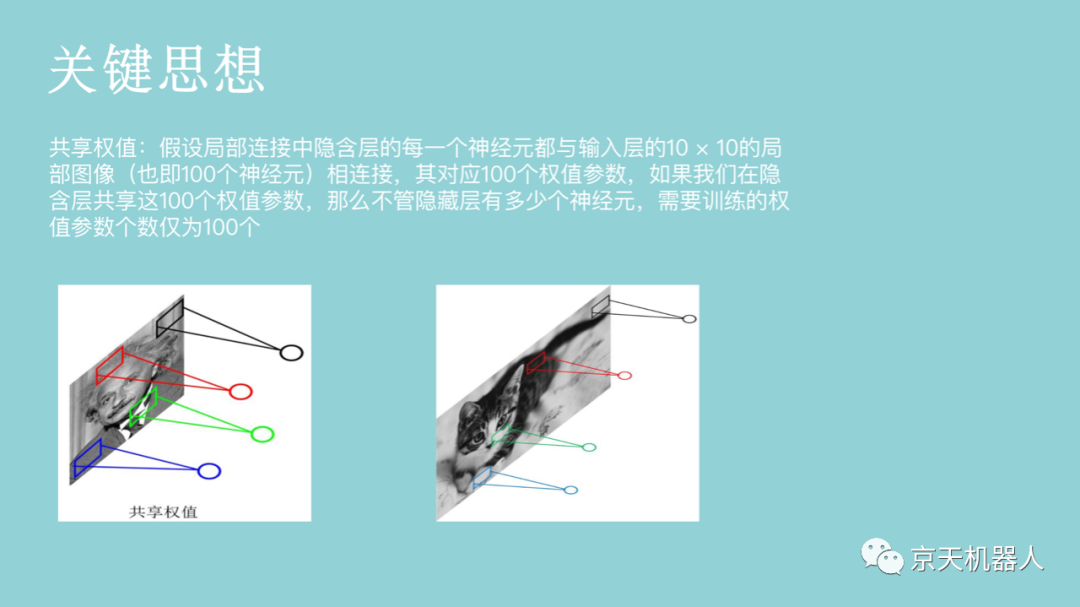
卷积操作可以看成是提取特征的方式,不同的卷积核能够得到图像的不同映射下的特征,称之为特征映射(Feature Map)。如果把一个卷积核看成提取一种特征,那么我们可以通过使用多个不同的卷积核来达到提取多个特征的目的。如果有64个卷积核,那么就可以提取64种特征,两层之间的权值参数也仅为100×64= 6400个。
图像识别能够解决的问题,也是从一开始只能识别一些简单的图像,到现在能够识别较复杂的场景,但是离人类对图像内容的全面理解还有很长的一段距离。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号