按系统分类,机械部分包含驱动系统和机械系统两个子系统。按部位分类,机械部分又可以分为头、胸腔、手臂、手、腿和足等。
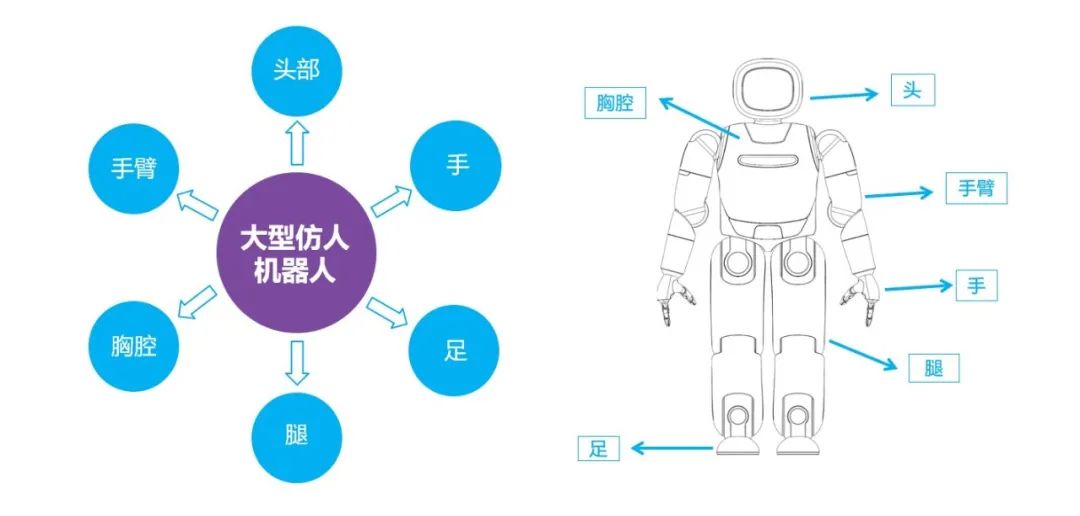
仿人机器人机械部分的部位分类
作为机械部分的关键点之一,整机构型与关节的数量及布置方式紧密相关。一般成年人的骨头有206块,大的关节有78个,而仿人机器人模拟人类的关节和骨骼架构,通常有15-70个关节。
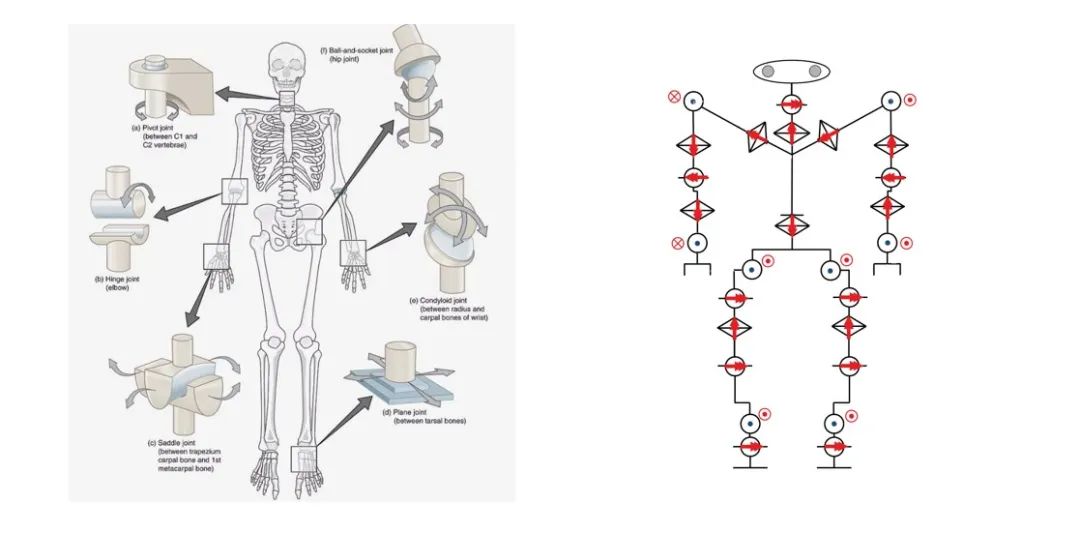
人体关节类型分布vs一般大型仿人机器人关节类型分布
仿人机器人通常头部有1~3个关节,手臂有4~7个关节,腿部有6~7个关节,手部有2~13个关节。
整机构型的重要性
进行整机构型的研究应用,是一项极具挑战性的工作,对机器人设计的成功至关重要,备受国内外机器人团队关注。
❏ 国外研究现状














 粤公网安备 44010602004358号
粤公网安备 44010602004358号