机器人行走轨道系统即机器人行走轨道系统,主要包括以下部件。
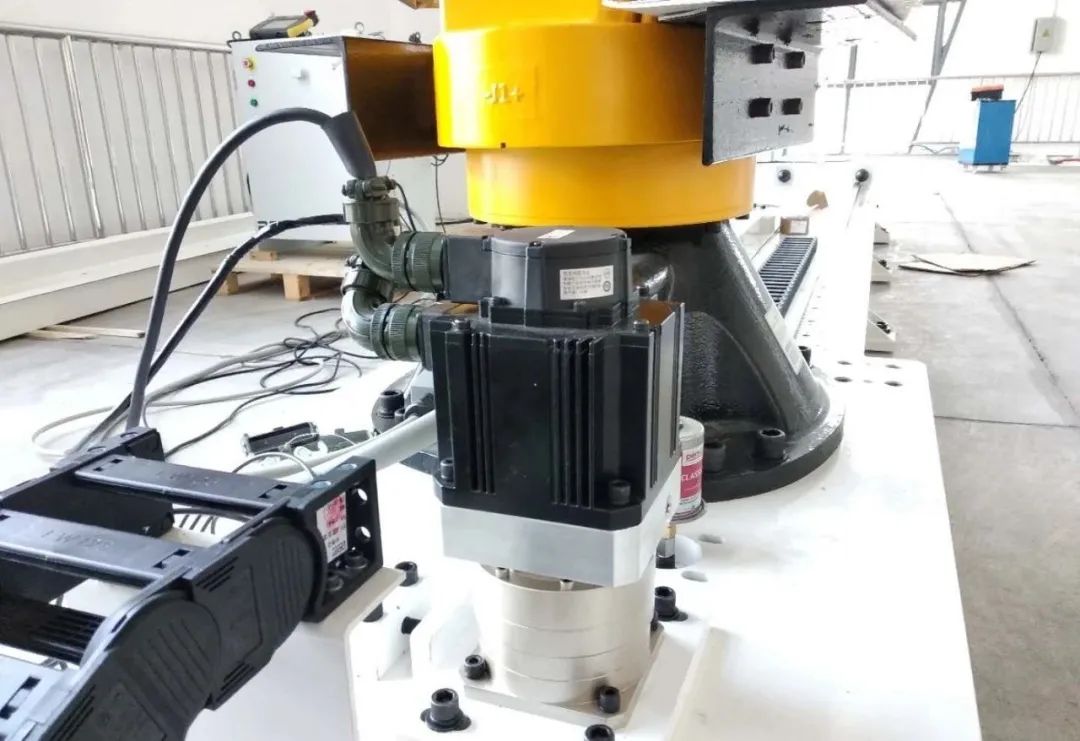
1、机器人轨道基座
CUBIC 第七轴本体轨道基座采用高强度型钢与优质钢板焊接而成,大限度的保障其精度,有效避免变形和振动的情况出现。
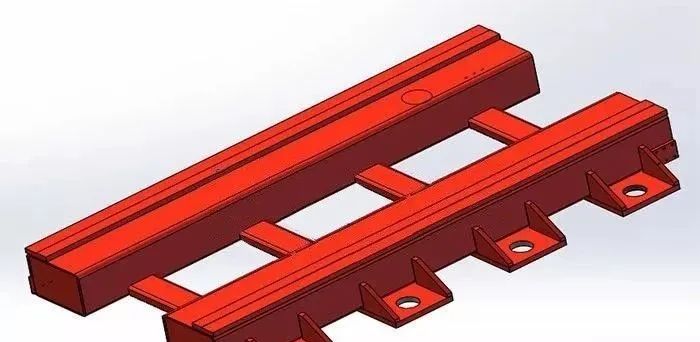
2、配备一体式滚轮齿条导轨
利用行走重载滚轮导轨齿条来进行工件之间的转送,运行速度快,有效负载大 , 有效的扩大了机器人的动作范围,使得该系统具有高效的扩展性。可根据需要进行拼接,有一体成型、精度高、承载大、不易变形的特点。













 粤公网安备 44010602004358号
粤公网安备 44010602004358号