定位与地图构建(Simultaneous Localization And Mapping,简称SLAM),通常是指在机器人或者其他载体上,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。SLAM技术对于机器人或其他智能体的行动和交互能力至为关键,因为它代表了这种能力的基础:知道自己在哪里,知道周围环境如何,进而知道下一步该如何自主行动。它在自动驾驶、服务型机器人、无人机、AR/VR等领域有着广泛的应用,可以说凡是拥有一定行动能力的智能体都拥有某种形式的SLAM系统。
一般来讲,SLAM系统通常都包含多种传感器和多种功能模块。而按照核心的功能模块来区分,目前常见的机器人SLAM系统一般具有两种形式:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
激光SLAM简介
激光SLAM脱胎于早期的基于测距的定位方法(如超声和红外单点测距)。激光雷达(Light Detection And Ranging)的出现和普及使得测量更快更准,信息更丰富。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
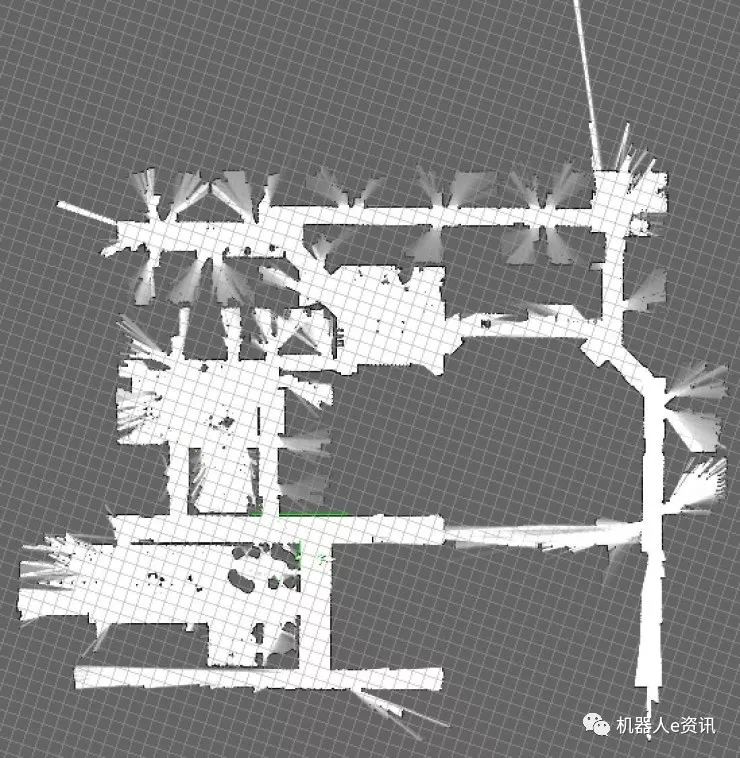
图1,激光SLAM的地图构建(谷歌Cartographer[1])
VSLAM简介
眼睛是人类获取外界信息的主要来源。视觉SLAM也具有类似特点,它可以从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。早期的视觉SLAM基于滤波理论,其非线性的误差模型和巨大的计算量成为了它实用落地的障碍。近年来,随着具有稀疏性的非线性优化理论(Bundle Adjustment)以及相机技术、计算性能的进步,实时运行的视觉SLAM已经不再是梦想。
通常,一个VSLAM系统由前端和后端组成(图2)。前端负责通过视觉增量式计算机器人的位姿,速度较快。后端,主要负责两个功能:
一是在出现回环(即判定机器人回到了之前访问过的地点附近)时,发现回环并修正两次访问中间各处的位置与姿态;
二是当前端跟踪丢失时,根据视觉的纹理信息对机器人进行重新定位。简单说,前端负责快速定位,后端负责较慢的地图维护。
VSLAM的优点是它所利用的丰富纹理信息。例如两块尺寸相同内容却不同的广告牌,基于点云的激光SLAM算法无法区别他们,而视觉则可以轻易分辨。这带来了重定位、场景分类上无可比拟的巨大优势。同时,视觉信息可以较为容易的被用来跟踪和预测场景中的动态目标,如行人、车辆等,对于在复杂动态场景中的应用这是至关重要的。第三,视觉的投影模型理论上可以让无限远处的物体都进入视觉画面中,在合理的配置下(如长基线的双目相机)可以进行很大尺度场景的定位与地图构建。
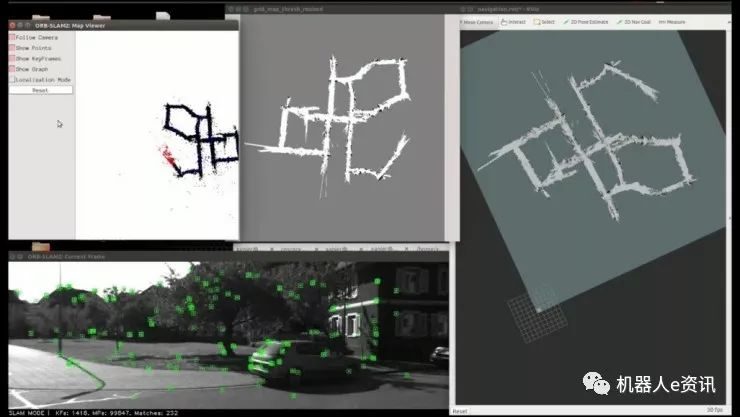
 图2,视觉SLAM的前端定位与后端地图维护(ORB-SLAM2[2])
图2,视觉SLAM的前端定位与后端地图维护(ORB-SLAM2[2])
接下来我们将在细分项目上比较激光SLAM和VSLAM。
应用场景
在应用场景上,激光SLAM依据所使用的激光雷达的档次基本被分为泾渭分明的室内应用和室外应用,而VSLAM在室内外都有丰富的应用环境。VSLAM的主要挑战是光照变化,例如在室外正午和夜间的跨时间定位与地图构建,其工作稳定性不如高端室外多线激光雷达。近年来,光照模型修正和基于深度学习的高鲁棒性特征点被广泛应用于视觉SLAM的研究中,体现出良好的效果,应当说VSLAM随着这些技术的进步将会在光照变化的环境中拥有更稳定的表现。
影响稳定工作的因素
激光SLAM不擅长动态环境中的定位,比如有大量人员遮挡其测量的环境,也不擅长在类似的几何环境中工作,比如在一个又长又直、两侧是墙壁的环境。由于重定位能力较差,激光SLAM在追踪丢失后很难重新回到工作状态。而视觉SLAM在无纹理环境(比如面对整洁的白墙面),以及光照特别弱的环境中,表现较差。
定位和地图构建精度
在静态且简单的环境中,激光SLAM定位总体来讲优于视觉SLAM;但在较大尺度且动态的环境中,视觉SLAM因为其具有的纹理信息,表现出更好的效果。在地图构建上,激光SLAM的特点是单点和单次测量都更精确,但地图信息量更小;视觉SLAM特别是通过三角测距计算距离的方法,在单点和单次测量精度上表现总体来讲不如激光雷达,但可以通过重复观测反复提高精度,同时拥有更丰富的地图信息。
累计误差问题
激光SLAM总体来讲较为缺乏回环检测的能力,累计误差的消除较为困难。而视觉SLAM使用了大量冗余的纹理信息,回环检测较为容易,即使在前端累计一定误差的情况下仍能通过回环修正将误差消除。
传感器成本
激光雷达事实上有许多档次,成本都高于视觉传感器。最昂贵如Velodyne的室外远距离多线雷达动辄数十万元人民币,而室外使用的高端中远距离平面雷达如SICK和Hokuyo大约在数万元人民币的等级。室内应用较广的中低端近距离平面激光雷达也需要千元级—,其价格相当于比较高端的工业级摄像头和感光芯片。激光雷达量产后成本可能会大幅下降,但能否降到同档次摄像头的水平仍有一个大大的问号。
传感器安装和稳定性
目前常见的激光雷达都是旋转扫描式的,内部长期处于旋转中的机械结构会给系统带来不稳定性,在颠簸震动时影响尤其明显。而摄像头不包含运动机械结构,对空间要求更低,可以在更多的场景下安装使用(图3)。不过,固态激光雷达的逐步成熟可能会为激光SLAM扳回这项劣势。

图3 激光雷达和视觉系统的安装应用。谷歌无人车上的多线激光雷达

DJI精灵4上的视觉系统。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号