05
基于 3D 视觉的空间避障技术
作为目前智能设备非常重要的传感器——视觉,也逐渐开始应用到AGV上。传统定的AGV一般使用2D激光作为避障传感器,其缺点就是只能检测一固定平面的障碍物,对于高于或低于此平面物体都是其盲区。3D传感器实现了对更高高度障碍物的检测与躲避功能,较好的解决盲区问题,增加AGV的安全性。

06
基于时间预测机制的 AGV 调度技术
AGV调度系统主要实现AGV系统车辆管理、交通管制、调度管理等功能。兰剑采用的是基于时间预测机制的 AGV 调度技术解决多车的路径规划和冲突问题。
命时间窗为 AGV 占用空间资源的起始时间和终止时间这一段时间,当不同 AGV 占用资源时间窗没有重叠时,则表明没有发生碰撞。若有潜在碰撞产生,则调整原有时间窗实现避碰。多车按优先级依次调整时间窗,在大规模AGV应用场景中,可有效提高AGV利用率,降低交通避障几率,提高AGV系统效率。
07
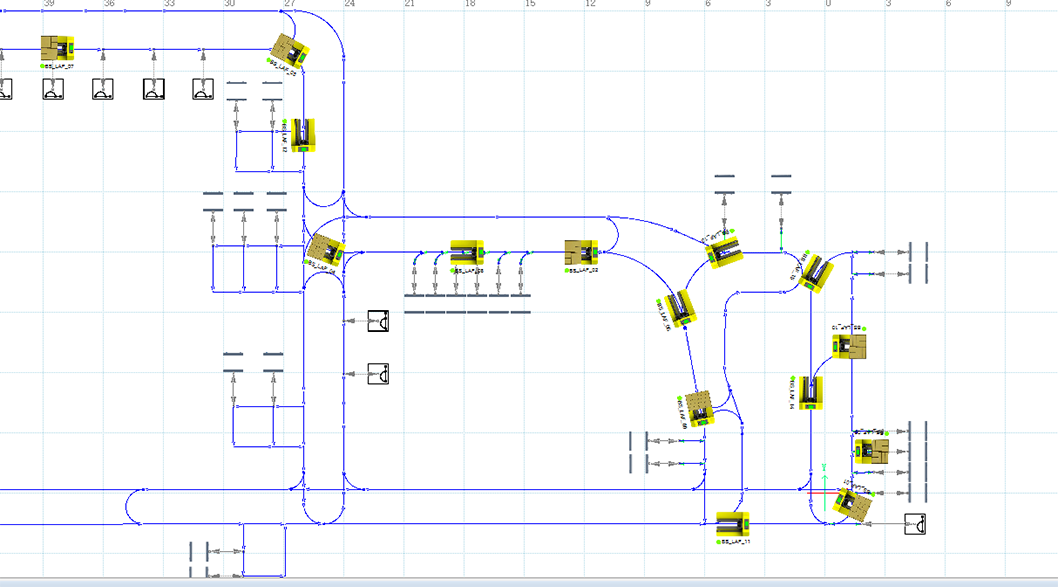
AGV 监控与仿真一体化技术
AGV仿真系统是在实施AGV系统之前,根据客户生产节拍、现场布局条件等,进行前期的规划配置和仿真验证。兰剑AGV仿真系统准确率为98%,确保AGV数量、系统效率能够满足客户需求,并且不产生冗余浪费。
兰剑自主开发的监控与仿真一体化技术,可以让仿真端模组与监控端模组共用一套核心算法与参数,相比独立的仿真软件,仿真结果更加准确。

基于对客户仓储物流自动化需求的深入理解,运用自主研发的核心技术,在丰富的项目经验基础上,通过方案仿真设计、软件产品开发、硬件产品设计及零部件定制和装配、系统集成等环节,为客户提供涵盖存储、拣选、输送、包装、监控、管理等环节的定制化仓储物流自动化系统解决方案,助力客户实现仓储物流作业的可视化、信息化和智能化,降低仓储物流作业成本,提高仓储物流作业效率和准确性,帮助客户实现仓储物流环节的降本增效。
兰剑,聚焦高端市场和头部企业,致力于成为具有国际竞争力的中国高端物流装备企业。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号