比如卓翼这款基于室内光学定位系统的室内多旋翼控制平台
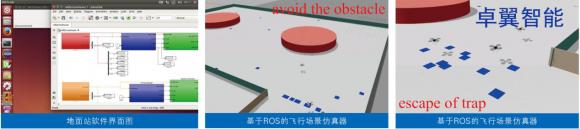
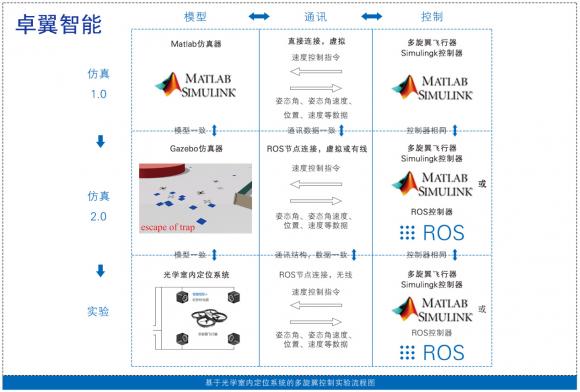
基于Matlab或ROS的飞行场景仿真器可较真实模拟真实飞行器的动态,并且可模拟节点通讯方式,方便后续仿真。Matlab或ROS的地面控制站可实时读取基于ROS的飞行场景仿真器、光学室内定位系统节点,还能读写真实多旋翼飞行器节点,从而能够在Matlab或ROS平台下统一地从仿真到真实实验,最终轻松完成多旋翼飞行器的控制。开发高效,能很好地帮助学生完成探索科研的想法。
而且卓翼与北京航空航天大学可靠飞行控制研究组制作深度合作,为整个教学研发了相应的教学指导视频、及教材指导,方便老师由浅入深地为学生讲解实验的原理、步骤、目标等。系统还附有配套的例程代码,方便学生快速掌握、理解。进一步,通过实验操作,大大提高学生的实际操控能力,从而加深对书本理论知识的理解。
实验室的设计不仅以学生为核心,更以老师的因才施教为导向,基于室内光学定位系统的室内多旋翼控制平台,可以快速实现多旋翼无人机的多项自主控制任务,譬如悬停、轨迹跟踪等,为控制类教学演示及二次开发实验提供核心设备支撑,同时还能帮助老师进行系统性教学研究,专业高效、便携易用,将大大促进控制类教学服务升级。

可开设课程多样化
多旋翼滤波器设计
多旋翼定点位置控制器设计
多旋翼路径跟随控制器设计
多旋翼跟踪控制器设计
多旋翼避障控制器设计
多旋翼区域覆盖决策设计
多机编队控制设计
多机投递决策设计
系统组织
多旋翼飞行器、基于Matlab或ROS的飞行场景仿真器和地面控制站(含计算机)、实验指导包(指导书、视频、例程)












 粤公网安备 44010602004358号
粤公网安备 44010602004358号