机器人协同管制
系统内设有虚拟轨道与多机器人协同管制,可实现同时高效运行,道路共享。
高效调度
减轻工人脑力,减少出错率,系统会对接用户MES/WMS,任务下达后,系统会对所有的机器人资源调度分配。
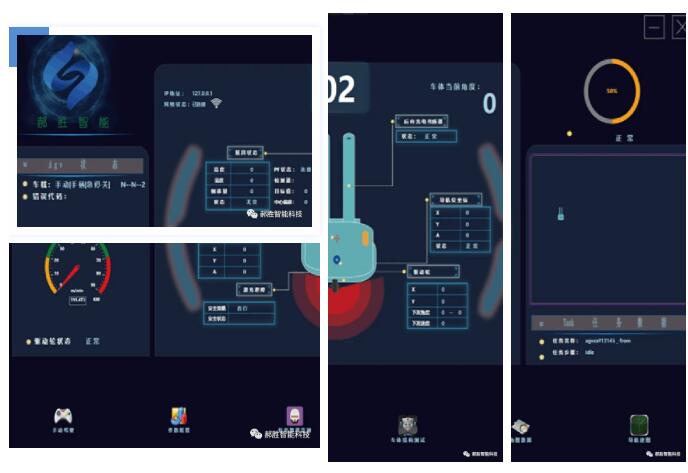
AGV车载系统
AGV车载控制系统是用于移动机器人应用的专业级客户端软件,旨在为用户提供快捷、简便、专业的移动机器人解决方案。
AGV运行现场地图设置
位置点设定,虚拟道路编辑,禁区编辑,路径状态锁死编辑
任务逻辑编写
编辑任务模块,编写任务链接
AGV叉车运动控制,重新定位,AGV叉车状态监控,固定线路导航,循环寻径,手动操控,地图配置,参数配置













 粤公网安备 44010602004358号
粤公网安备 44010602004358号