引用文章:
张佳龙, 闫建国, 张普. 基于自适应方法的多无人机编队队形控制[J]. 航空学报, 2020, 41(1): 323385.
研究背景
在无人机近距编队飞行过程中,编队控制是维持正常稳定飞行的关键因素之一,无人机编队飞行稳定性受到很多外界因素的干扰,比如,风场,尾涡效应,机载任务,飞控系统以及链路等,这些干扰会严重影响无人机编队飞行的稳定性。尤其,风场的大小和方向会改变编队中任意一架无人机的气动力和气动力矩,进而改变其迎角和侧滑角,使得无人机偏离预设的队形,极易与其他无人机发生碰撞。因此,在风场干扰下风场信息的获取非常重要,这使得无人机编队飞控系统设计面临严峻的挑战。

图1无人机编队队形保持图(图片来源于网络)
论文的创新点和创作灵感
针对风场产生的扰动破坏无人机编队队形,提出了一种三维空间的误差抑制自适应控制方法。在本文中,将“长机-僚机”近距编队所处风场简化为3个方向的标量,分别为横侧向,横向以及垂直方向。编队中任意一架无人机受到三维空间风场的干扰,都会使相邻两架无人机在空间3个方向上产生距离偏差,即相对运动模型产生一个增量,通过对3个方向风场的估计,以抵消所产出距离误差。本文所提出的自适应控制方法在风场环境下,能够实现无人机之间相对运动的精确控制,使横侧向距离误差精度提高15%,横向距离误差提高10%以及垂直方向提高5%。因此,本文所提的自适应控制方法,能够有效实现对编队队形的实时控制。所提出的自适应控制方案,如图2所示:
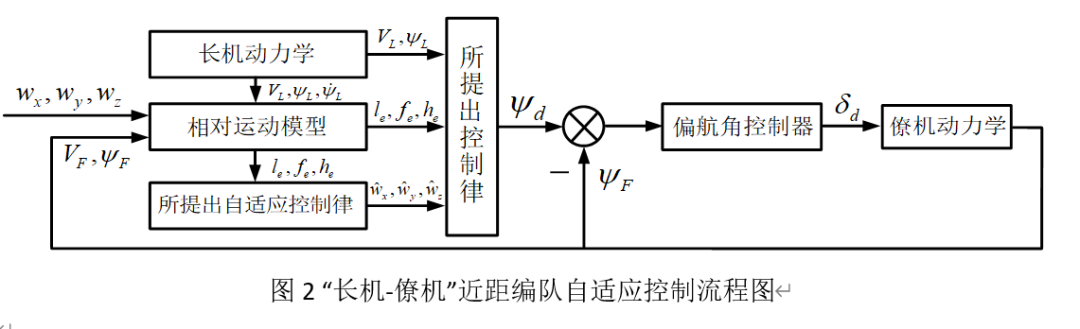
图2 “长机-僚机”近距编队自适应控制流程图
总结与展望
针对“长机-僚机”近距编队在风场扰动下飞行问题,本文所提出的自适应控制算法能够使得无人机在空间3个方向抵消风场产生的扰动。主要贡献和存在不足:
(1)所提出的自适应控制方法在风场环境下,能够实现无人机之间相对运动的精确控制;
(2)在风场扰动环境下,无人机编队能够按照期望的队形稳定飞行,并且具有良好的鲁棒性;
(3)假设长机和僚机之间的相对距离是常数,则“长机-僚机”队形的几何中心可以简化一个刚性质点进行研究,进一步将三维空间风场研究转化为3个二维平面上进行研究,简化了所研究问题的复杂程度;
(4)在本文中,未考虑无人机近距编队之间产生的尾涡效应,侧重研究了风场因素对队形的影响,因而尾涡效应和风场耦合作用对队形影响将是本文下一步研究的工作。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号