导读 ID:Fly_Home5
了解无人机感知避让技术,从无人机空中态势感知、飞行冲突预测和飞行冲突解脱三个方面对该技术研究现状进行总结。

有人机上的飞行员可通过“看见-规避”的方式来判断当前态势,针对威胁做出决策并完成规避工作以保证飞行安全,对于无人机采用的则是“感知-避让”技术。感知避让过程可划分为环境态势感知、飞行冲突预测和飞行冲突解脱三个部分:无人机通过自身携带的传感器对当前空域内的环境进行探测,利用通信网将周围态势向合作目标进行传输,系统预测未来一段时间内的飞行路线上是否存在飞行冲突,自动生成决策指令并执行规避动作以应对突发威胁,确保飞行安全。
一、无人机空中态势感知方法
不同的传感器可探测感知的目标不同,根据无人机所携带使用的传感器类别可将无人机态势感知方法分为合作型和非合作型两种。
合作型感知探测
合作是指无人机与周围的航空器同属一方,它们之间互相通信,能够通过共同的通信链路共享当前空域的态势信息。比如空中交通告警与防撞系统(TCAS)和广播式自动相关监视系统(ADS-B)等。TCAS主要由应答机、收发机、告警计算机和告警显示装置等组成,该设备昂贵,主要装载在有人机上;ADS-B是一种相对较新的技术,该系统有信息源、信息传输通道和信息处理与显示设备组成,通过精确实时的信息交互可为无人机提供决策引导,实现感知避让。
非合作型感知探测
非合作表示无人机与周围的航空器或物体之间没有通信关系,无法共享各自的状态信息,需采取主动探测的方式。雷达和视觉传感器等是目前常用的非合作型探测设备。雷达是利用电磁波进行目标探测的电子设备,在防止航空器相撞上的研究应用已较为成熟,其探测范围和精度与雷达的天线大小有关,天线越大则范围越远、精度越高。光电传感器技术也比较成熟,且具有无缘性和鲁棒性等特点,与其他设备相比较有明显的优势。
二、无人机飞行冲突预测方法
无人机飞行冲突预测是在周围环境进行感知并获得当前态势的基础上采取某种预测方法对未来一段时间内的飞行状态作出推测,判断是否存在飞行冲突,是无人机感知避让的关键环节,目前,主要预测方法有概率分析法和几何分析法。
概率分析法
概率分析是通过建立概率性冲突预测模型来预测判断航空器在未来一段时间内是否存在飞行冲突。Lygeros PJ 和Prandini M提出了短期预测和中期预测两种模型:短期预测模型是预测未来几秒到几分钟内的飞行情况,此时若存在飞行冲突,则必须通过执行相应规避动作;中期预测模型则是用来对未来数十分钟内的飞行情况进行预测,判断将来时间内有无飞行冲突,若存在飞行冲突则通过防撞算法进行机动以避免发生难以控制的短期冲突。由于概率分析法是采取数学计算的方法来求解飞行冲突可能发生的概率,计算量较大,现有嵌入式计算机的处理速度尚不能完全满足实时计算的要求,因而概率性冲突预测法在实际中的应用受到很大的限制。
几何分析法
几何分析法是指利用几何方法建立确定性冲突预测模型,通过划设保护区等方法判断航空器之间是否存在冲突威胁。李彬等人考虑了航空器飞行途中随机因素和探测设备误差的影响,通过选取椭球壮保护区模型建立了常速模型和冲突探测模型,运用卡尔曼滤波的方法对航空器的航迹进行预测,排除了不可能发生冲突的航空器进而减少了计算量。几何分析法简单直观,计算量小,可以满足实际需要。但目前对几何分析法的研究大多在水平范围或垂直方向上的二维空间,局限性较大。

三、无人机飞行冲突解脱方法
无人机感知避让的最终目的是化解飞行冲突,在无人机自主预测到飞行冲突前,必须立即依据解脱方法进行机动,保证无人机与其他航空器的飞行安全。目前冲突解脱方法主要有离散型解脱方法与连续解脱方法两种。
离散型解脱方法
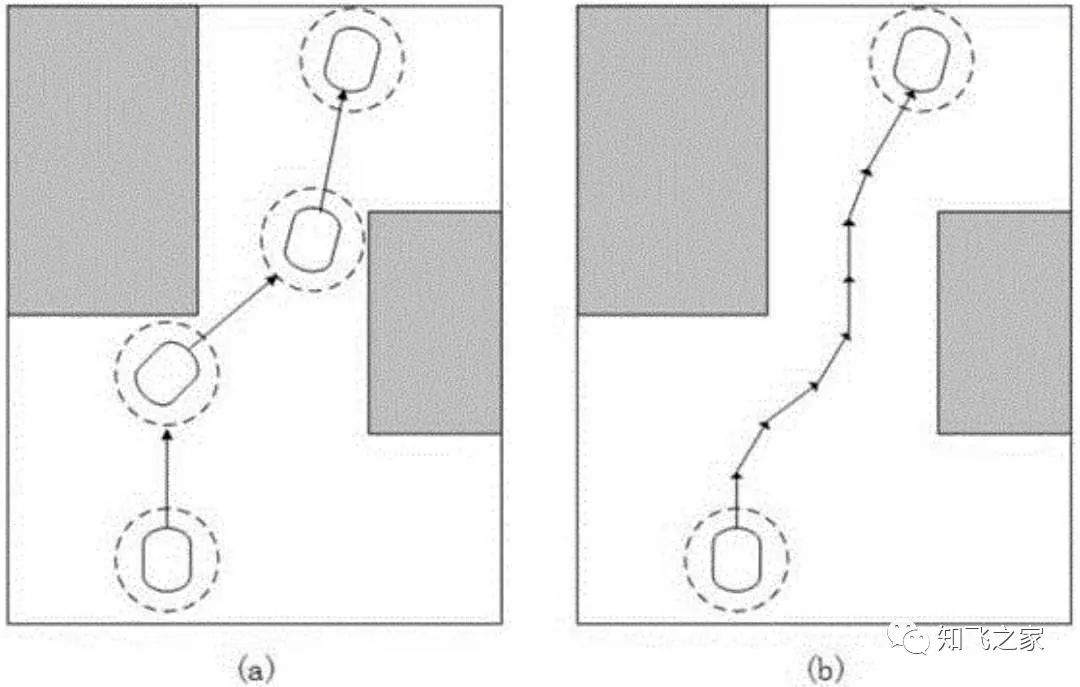
离散型方法是指通过对计划航路点的调整,在尽可能保持原有航线的基础上得到最大可能的无冲突飞行路线。大部分研究者采用基于遗传算法或粒子群算法寻优,得到有利航线(求解速度快、省油等约束下)。使用离散型解脱方法可以满足无人机正常飞行队安全距离的要求,且能够很好地处理少量航空器间的飞行冲突,但在解决大量航空器间的飞行矛盾时显露弊端。
连续型解脱方法
目前连续型解脱方法的研究主要是针对二维情况下的合作型目标,包括势场法、路径规划法和几何方法等。势场法将生活中的吸引和排斥现象应用到航迹规划中,计划航路点对无人机是吸引作用,吸引无人机朝着目标方向飞行,同时,空域内的其他航空器或物体对无人机产生排斥的力,在引力和斥力的合力作用下,使无人机在尽可能保持原航线的基础上安全飞行。无人机路径规划法就是指依据人物要求和周围的环境信息等因素,事先规划出一条从起点到终点的最优无碰撞路线。碰撞锥方法(Collision Cone Approach,CCA)是典型几何算法的一种,CCA的基本原理是划设一个以入侵航空器为中心的球体保护区,无人机到保护区的所有切线构成碰撞锥,调整无人机的相对速度与球体保护区相切,此时可求解无人机的最优解脱路线。
目前,无人机的防撞能力与有人机相比还存在差距,感知避让技术还不够成熟,冲突预测和解脱算法大多局限在双击和二维空间,尚不能满足无人机在保证飞行安全的前提下与有人机共享空域的要求。今后的研究将向多数据融合、智能化、实时性的方向发展,增强无人机对周围环境的探测能力、态势感知能力、预测冲突和解决冲突的能力,发展机遇数据融合的多传感器组合方式进行探测,解决三维空间内多机间的冲突问题,大幅提高无人机的防撞能力和安全水平。同时,改进和完善无人机防撞制度和体系,将制度体系与防撞技术相融合是无人机防撞工作的又一发展趋势。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号