本文结合小型自动无人机(UAV)与多功能农业无人驾驶地面车辆(UGV),开发了一个适用于精准农业的适应性机器人解决方案,并详细介绍了该方案的科技进展和成果,植物表型资讯介绍如下:

全自动机器人在农业中的应用越来越受到人们的欢迎,因为它可能会对粮食安全、可持续性、资源利用效率、减少化学处理、降低人工成本以及最大化作物产量产生巨大影响。本文结合小型自动无人机(UAV)与多功能农业无人驾驶地面车辆(UGV),开发了一个适用于精准农业的适应性机器人解决方案,并详细介绍了该方案的科技进展和成果。
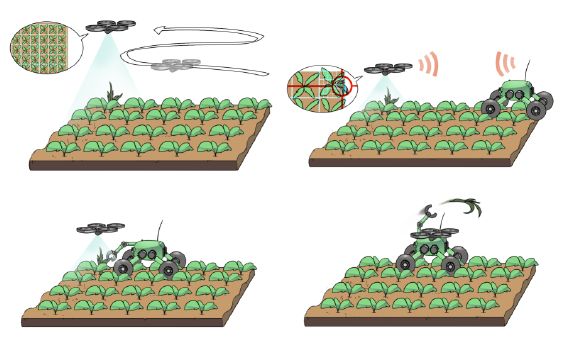
项目概念概述
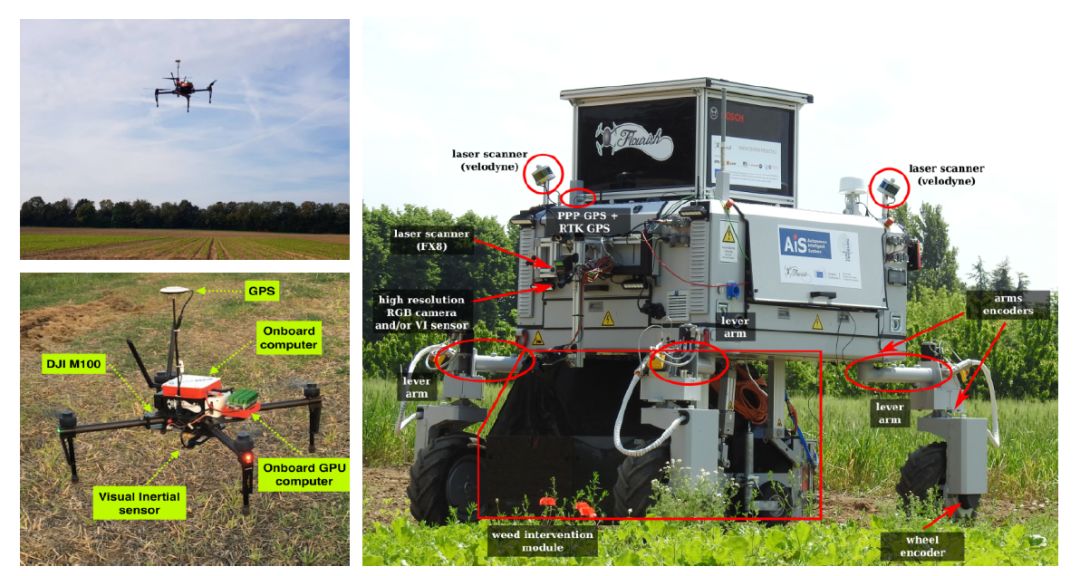
实验和演示中使用的两个主要机器人
该方法首先引入多光谱感知算法和基于空中-地面系统,监测作物密度、杂草胁迫、作物氮营养状况并准确分类和定位杂草。然后介绍导航和测绘系统,处理所使用机器人和农业环境的特殊性,并着重描述使UAV和UGV能够在统一的环境模型中收集和共享信息的协作模块。最后给出在不同田间条件和不同作物条件下实施和测试的地面干预硬件、软件解决方案和接口。综上所述,结合UAV和UGV对田间进行监测能够以完全自主的方式进行选择性喷洒处理田间杂草。
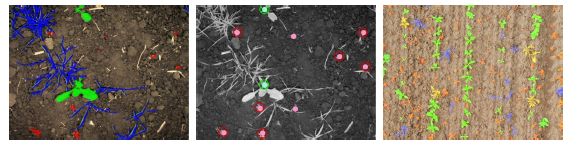
通过本文的植物分类系统得到的实例结果
来源:
Pretto A, Aravecchia S, Burgard W, et al. Building an Aerial-Ground Robotics System for Precision Farming. arXiv:1911.03098 [cs.RO].












 粤公网安备 44010602004358号
粤公网安备 44010602004358号