首先来看一下
“AGV是如何导航的?”
▽
AGV是何物也?
官方名称自动导引车
当然还有其他的别称:
LGV(激光导引车)
SGV(自动导引车)
移动机器人
自动驾驶车
无人驾驶车
...
车辆结构形式主要有叉车、牵引车、推车等车辆上有数个AGV指导系统用于驱动和管理定位让AGV依照制定的路线行走

常见的AGV导航系统:
激光制导导航
磁导航
自我导航功能的AGV(SLAM、激光雷达导航)
线导航
光学导航
视觉导航

LGV
LGV或激光引导车也是AGV的一种
可以使用激光定位系统进行导航。
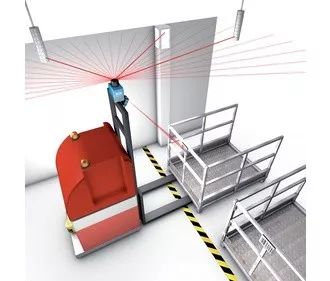
每辆车都配备了一个导航激光器
位于杆的顶部
与位于AGV工作区域的目标相互作用

导航设备将旋转的激光阵列向360度发送
这些阵列影响几个反射器目标
反射器是大约60厘米高的反射带或圆柱体
位于设施结构中,如柱子,墙壁,柱子等
反射器中心必须和导航设备高度齐平
最远距离AGV(大约100英尺)30米

SICK导航激光和反射器
反射器将激光器阵列发送回激光导航设备
LGV获得至少三个这些阵列反馈
允许根据非常复杂的算法计算其定位。
根据AGV制造商的不同
LGV可以计算并更正其每秒30到40次的定位
精度很高
易于安装无侵入式安装LGV只需要放置反射器准确定位定位算法非常复杂精度位置接近±5 mm非常快的车辆可以达到2米/秒无需安装维护费用你只需保持反射器清洁
对速度有要求,并且有多个目的地和轨道时。
激光导航易于安装,AGV供应商将在AGV管理系统上安装反射器并模拟AGV路径以定义AGV路线。
一切都是“虚拟的”,没有基础设施,如地板下的地板或电线,所以在同一个走廊,你可以拥有你想要的路线。
因此,如果您拥有一个非常大而复杂的路线系统,那么激光导航车辆将非常有用。
看完下面这个视频,你可以想象一下,如果在每条轨道上放置磁带以满足每个装载和卸载位置,这将是一件麻烦事!▽

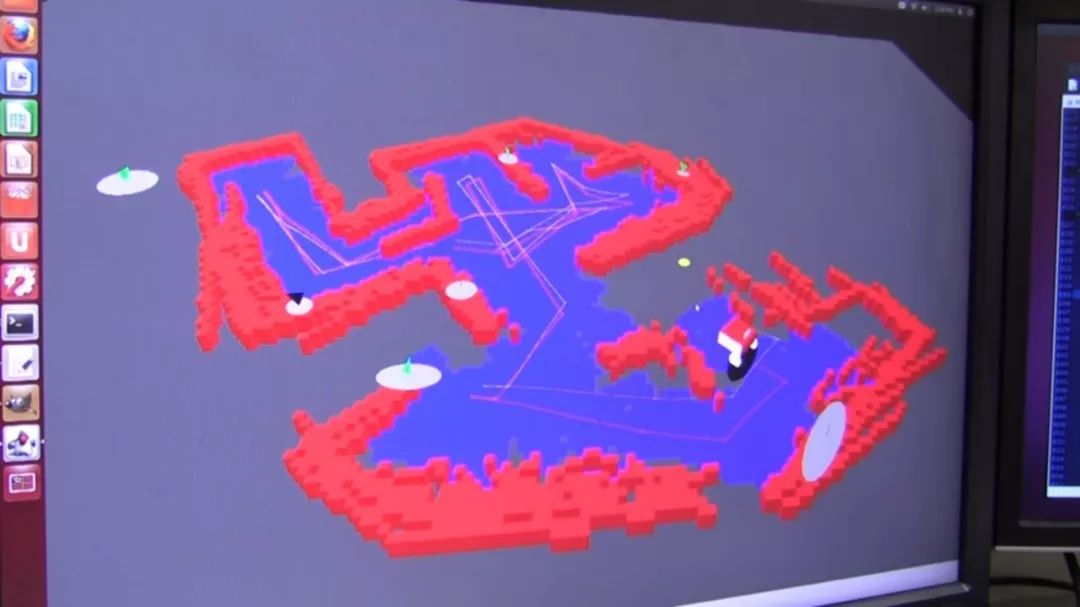
自我导航最重要的是SLAM导航,能够同步定位和映射(SLAM)。它意味着带有SLAM导航的AGV能够映射其环境并通过从映射阶段收到的信息,并本地化它的位置。
AGV能够用用于安全目的的相同激光绘制环境图,下面是奥地利AGV制造商DS AUTOMOTION的视频。
▽
您在AGV管理系统中加载房屋的AutoCAD(或类似)地图
您沿着AGV路线手动驾驶AGV(例如使用操纵杆)。在进行中,AGV将映射环境。
两个数据,AutoCAD地图和实际映射环境都匹配,定义初始坐标(0,0)。
每次AGV将自动驱动通过该路线,它将检查他“看到”的是否与他的“大脑”上加载的相同,使他能够定义他的位置。
AGV采集的所有数据都与来自测力计,编码器的其他数据一起完成,以提高准确性。
AGV自我导航优势?
易于安装。
安装相对较快,而大部分工作由供应商工程师在办公室完成。
安装成本低
无侵入式安装。
SLAM导航AGV不需要任何类型的外部基础设施
实施维护不需要任何费用
SLAM导航将替代其他类型的导航,如磁导航,光学导航等。
这是AGC和牵引车的良好解决方案,主要的AGV制造商正在开发AGV并将其纳入其AGV。
SLAM技术的主要优势在于其在可变环境中的可靠性,例如人员,其他装置,箱子,托盘等不断移动的生产线。
在这种情况下,AGV可能找不到它的位置。因此,当您拥有定义明确的配置文件和具有固定结构(如墙,柱)的环境时,SLAM是AGV的理想解决方案。
SLAM可用于仓库,医院......,在任何“混乱”程度较低的环境中。

AGV可以在嵌入地板上的小圆柱形磁点之后导航。磁点用作圆柱形磁体,尺寸接近20x10 mm。

磁点和AGV传感器来自AMERDEN AGV的Immage,每个250-500毫米(接近15英尺)安装磁点,形成虚拟路径。AGV使用传感器控制从一个点到下一个点,例如霍尔效应传感器,编码器,计数器,陀螺仪传感器和其他类型的编码器,以校准转向角误差。
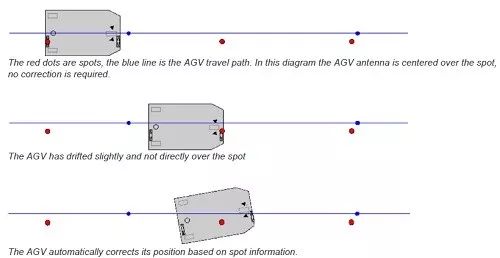
来自AMERDEN AGV的ImmageAGV遵循先前加载在AGV管理系统上的CAD图,并且磁点根据地图提供参考。与SLAM,LiDAR,ecc等其他“自由”导航系统所获得的公差相比,公差相对较好,达到近2.5毫米(1英寸)。 安装非常简单。必须在磁铁所在的地板上做一个小孔。之后,孔被环氧树脂覆盖。
磁点导航优势:
安装后,地板上没有任何结构 最好,话说回来什么是AGV最好的导航系统?答案是没有!他取决于你的项目和需求!要知道每种导航系统都有优缺点!












 粤公网安备 44010602004358号
粤公网安备 44010602004358号