第4期
金属外壳打磨设备
工艺说明
许多金属外壳(例如抽油烟机)
在焊接好之后,外壳的表面
难免会留下粗糙的焊缝

这个时候,就需要通过机器人
将打磨头安装在机械手上

然后,按照设定的运动轨迹
对焊缝进行自动抛光打磨

最终,就变成我们熟悉的
光滑、美观的抽油烟机啦
用户课题
01、抛光量难以精确控制
这个量的控制,决定了最终的打磨效果
既不能太大,导致金属外壳打磨过度
也不能太小,导致焊缝依然存在

而机器打磨不同于人工打磨的是
人可以根据实时情况来实时调整
而机器由于采集不到实时数据
只能一次次的计算、一次次的调整
很难做到高速高精度的打磨
02、机器人和PLC各自为阵
有的时候,你好不容易设定好了打磨轨迹
抛光量等等,却因为机器人和PLC之间的“不协调”
导致依然达不到期待的打磨效果

控制关键点
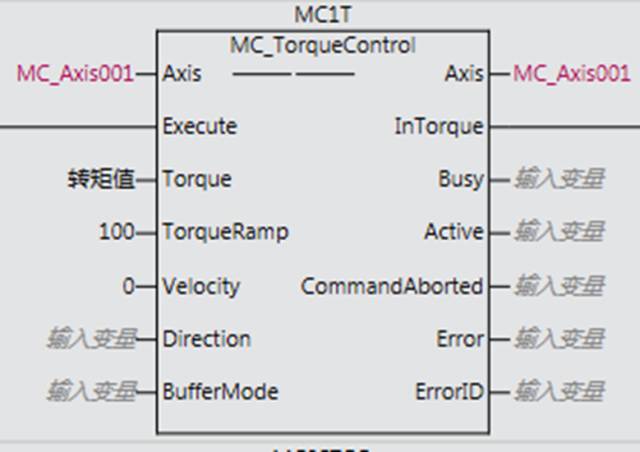
1、力矩控制
使用内置的MC_TorqueControl功能块
即可轻松实现力矩控制,操作超方便
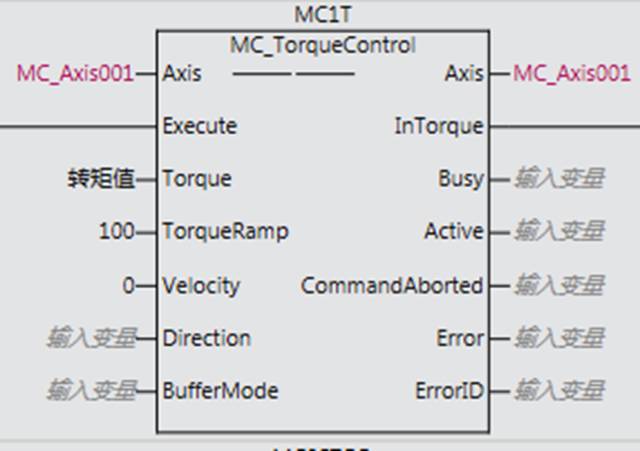
有了力矩控制功能
就可以实时采集到实际力矩
进行数据分析和调整
就如同人工抛光打磨一般
实现精确的抛光量控制
2
EIP通讯
通过EIP的Datalink功能,实现和机器人的通讯
机器人通过通讯给定在不同状态下
打磨头所属的力矩及速度
让机器人和PLC之间完美的结合起来
实现协调控制,达到最理想的打磨效果
NX1P方案配置
通过NX1P+ECT伺服
实时采集力矩值
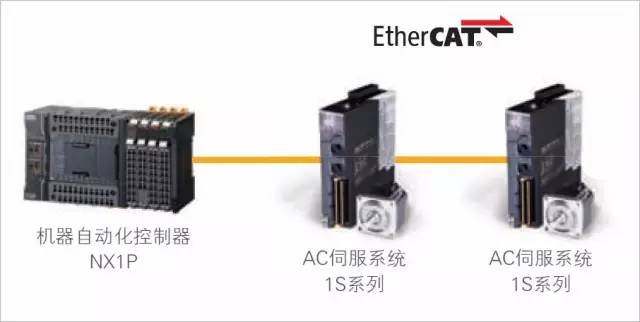
实现理想打磨效果
的最佳解决方案

更多价值
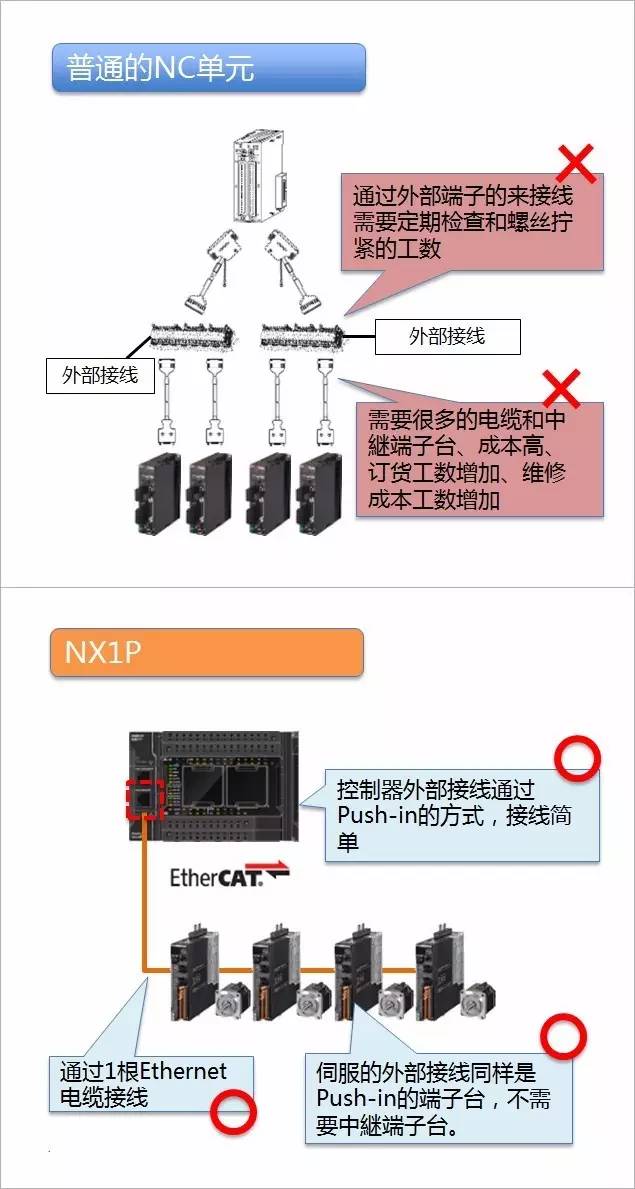
1、省配线、省空间化
NX1P和1S伺服配套使用、通过1根EtherNet电缆即可轻松配线,并且1S伺服的I/F本身就是端子台、不需要中継端子台。
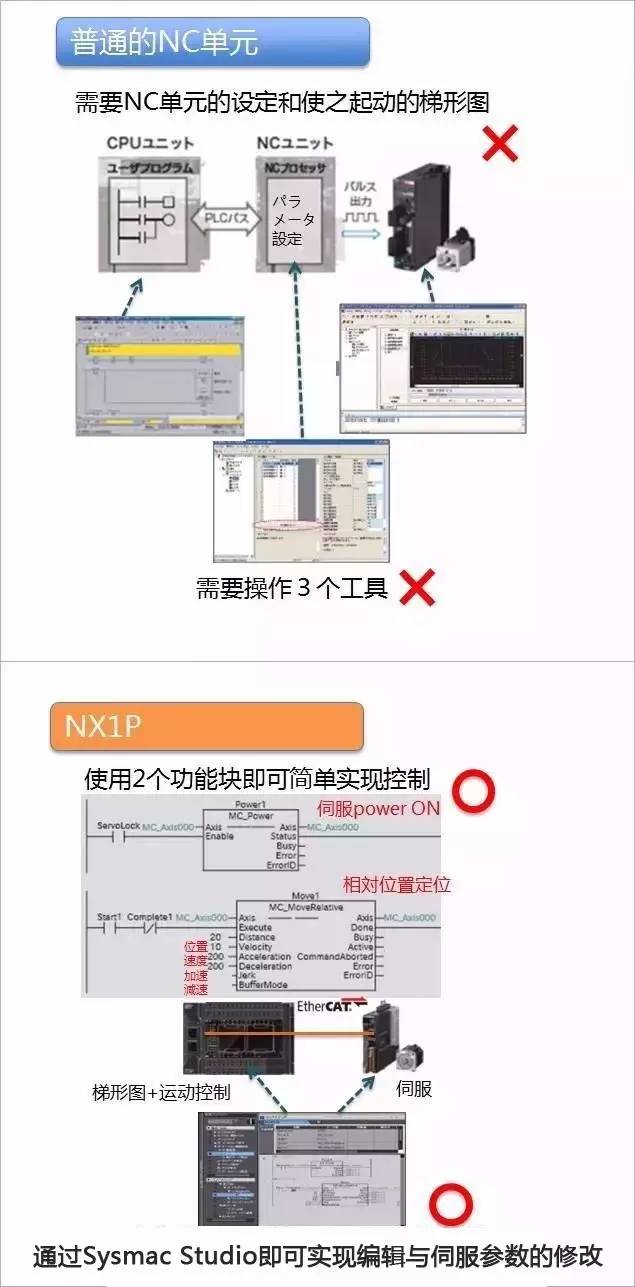
2、统一的编程环境
通过SysmacStudio进行编程设定,并可以通过FB简单实现编程。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号