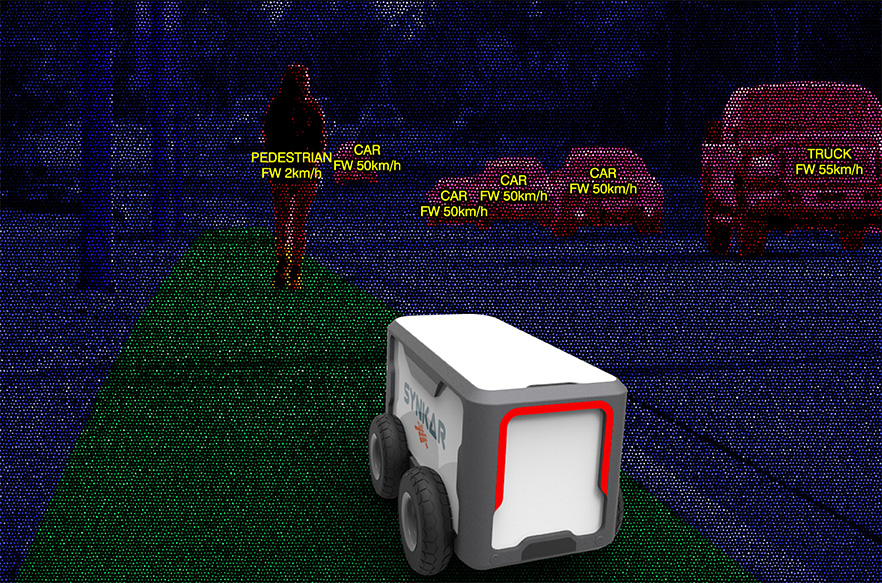
我们的机器人设计有多个摄像头、雷达和超声波传感器,以收集有关环境的信息。
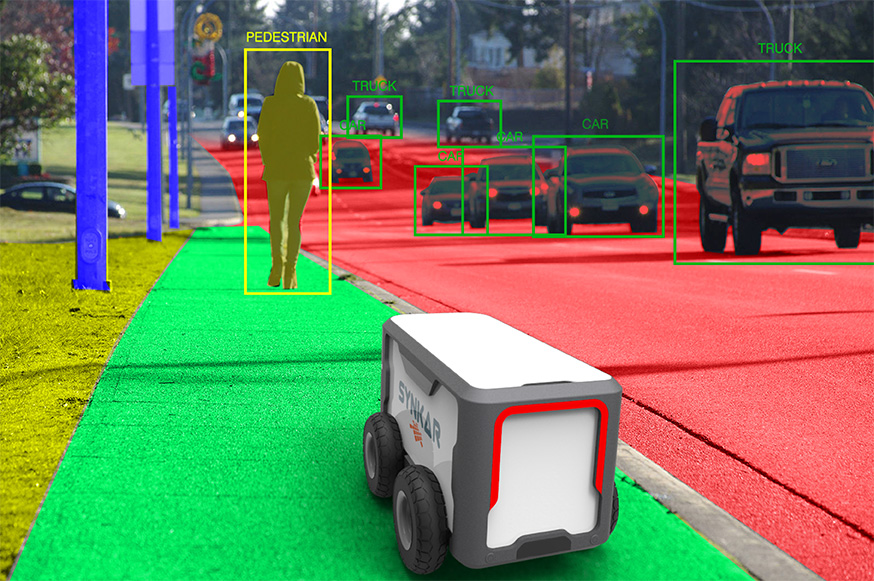
感知堆栈执行语义分割、对象检测和深度估计。因此,我们可以对车辆周围环境有非常详细的了解。
在设置阶段,Mapping Stack使用感知信息生成环境的多层地图,索引所有相关的感官信息。在操作过程中,定位堆栈接管,使用保存的地图来提高对机器人位置的理解。
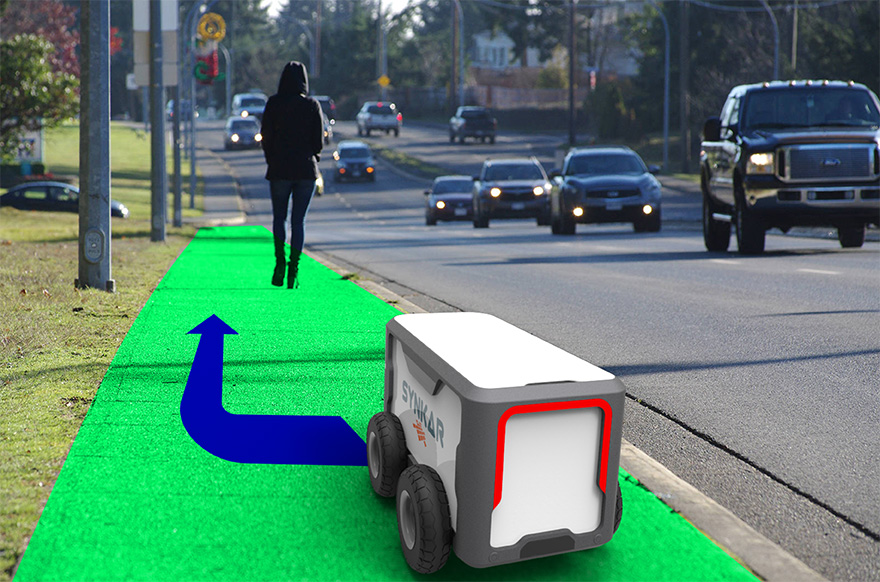
最后,将前面步骤的结果组合在一起,以创建世界的虚拟模型。我们的机器人用它来规划它们的路线,并对环境中的人、车辆和障碍物做出反应。





















 粤公网安备 44010602004358号
粤公网安备 44010602004358号