Autosub6000 已开发为在极端环境中运行,在 6000 米深的海洋深处运行,其中粉碎压力比表面大 600 倍。
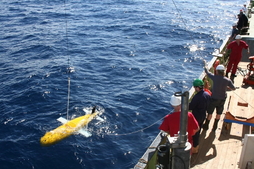
自动子6000 AUV
自2007年首次海上试验以来,Autosub6000取得了重大发展。2008年夏天,它进行了首次科学任务,用多光束声纳测量了西欧深处的深海冲刷特征。
2009年10月,AUV在卡萨布兰卡海山崎岖的地形上成功进行了5600米深的试验,并测试了基于扫描声纳的新的避障系统。2010年初,在RRS James Cook附近运行,AUV对于寻找和查明加勒比海开曼中部上升区两个热液喷口点的位置至关重要。
Autosub6000 的创新功能之一是 - 与早期的 Autosub3 不同 - 它不使用强压力容器来保护电池免受外部压力。相反,它使用我们专门开发的电池,它本身可以承受6000米深度的压力。这些被安装在浮力泡沫(句法泡沫)内的切口,组成AUV的中心部分。


















 粤公网安备 44010602004358号
粤公网安备 44010602004358号