您好,
欢迎访问
无人系统网
!
帐号管理
收藏夹
退出
消息
0
请登录
免费注册
手机关注
微信号:youuvs
关注官方微信
m.youuvs.com
手机扫码看新闻
我的办公室
销售
发布产品
管理产品
求购
发布求购
管理求购
添加收藏
关于我们
广告服务
广告服务
关键词排名
会员升级
帮助中心
常见问题
买家帮助
卖家帮助
问题反馈
网站导航
资讯
公司
产品
品牌
采购
展会
视频
资讯
资讯
公司
产品
品牌
采购
展会
视频
搜索
发布询价单
首页
资讯
公司
产品
品牌
采购
展会
视频
地图
工业机器人
服务机器人
特种机器人
军事机器人
无人船
无人汽车
无人机
人工智能
物联网
前沿技术
您的位置:
首页
>
产品
>
无人机(UAV)
>
无人机服务
>
其他服务
> 产品详情
无人机室内定位系统
品牌:
无人机室内定位系统
最小起订:
1
有效期至:
长期有效
更新时间:
2025-11-25 13:37
立即询价
加入收藏
普通商家
北京卓翼智能科技有限公司
经营模式:
整机制造商
地区:
中国北京市海淀区
进入店铺
联系方式
分享到:
企业推荐产品
更多>
卓翼智能无人机室内定位系统—重新定义无人机飞控实验室解决方案
无人机室内定位系统
无人机室内定位系统
无人机室内定位系统
无人机室内定位系统
无人机室内定位系统
TS-A8八旋翼系留无人机系统
TS-A12军用系留无人机系统
产品详情
产品参数
产品图片
1. 产品功能
多旋翼飞行器多功能教学研发实验平台用于多旋翼系统原理教学、多旋翼组装教学、基于视觉的导航多旋翼飞控开发教学及算法的研发与验证。
2. 系统组成
多旋翼飞行器多功能教学研发实验平台系统由多旋翼无人机、多旋翼无人机飞控、云台、摄像头、地面站、开发环境软件、仿真环境 软件等组成。
2.1. 无人机平台
多旋翼无人机采用电动四旋翼机型,用于提供试验平台的飞行能力。多旋翼无人机由机架、电机、电调、螺旋桨等组成。
2.2. 无人机飞控
多旋翼无人机飞控采用卓翼智能公司的ZY-MC-FCS科研型飞控产品。ZY-MC-FCS飞控专门针对科研用户开发,提供开放的开发环境及硬件在环的仿真环境。ZY-MC-FCS飞控可实现手动飞行、自动增稳飞行、全自动程控三维航线飞行;可实现航线、定高、定点、悬停、返航等飞行模式。
2.3. 云台相机
云台搭载航拍相机,可以精确控制俯仰和滚转角度、使拍摄画面更稳定。本系统采用专门针对无人机定制的高精度、轻便式三轴云台系统,具有重量轻、精度高、稳定性好等优点。
2.4. 地面站
地面站选用卓翼智能公司自主研发的ZY-GCS-S便携式地面站。ZY-GCS-S便携式地面站集飞行控制及任务管理软件于一体,采用了模块化的软件结构和开放式的软件接口设计,可以方便地进行二次开发和行业应用设计。
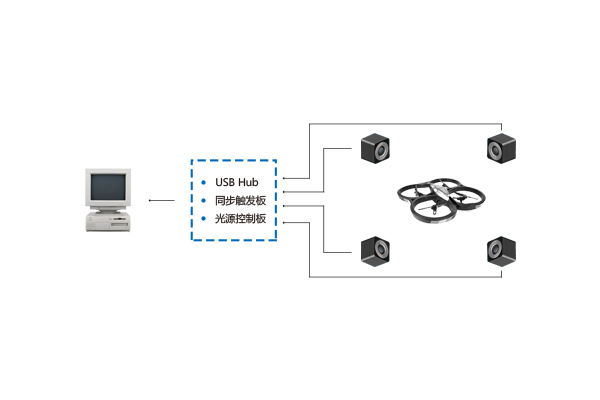
2.5. 视觉处理平台
视觉处理平台通过多旋翼无人机底部或前部的双目摄像头实时拍摄图像信息,图像处理板接收到图像信息后进行算法解算,并和飞控计算机的姿态和位置数据进行融合滤波,最后给出无人机的姿态、位置及障碍物信息,以实现精确导航或 视觉壁障。
卓翼智能的视觉处理平台包括高速相机、视觉计算平台、飞控等组成。
双目相机采用ZED二代立体相机。ZED相机的视觉能力来自于CUDA,也就是Nvidia顶级图形显卡的编程模型。它让运行相机配套软件的计算机有能力以15fps的速度去处理最高4416x1242分辨率的实时景深地图。如果分辨率降低,其处理速度更是可以达到最高120fps。
视觉处理板采用NVIDIA Jetson TX1,作为同类产品中性能最好的视觉计算平台,Jetson TX1面向移动嵌入式系统市场中的 GPU 加速并行处理,在深度学习和计算机视觉方面的高性能、低能耗计算,使其成为多种密集型嵌入式项目(如无人机、自主机器人系统等)的理想解决方案。
视觉导航原理图如下:
2.6. 开发环境
本系统提供飞控软件开发环境,基于Eclipse开发,可实现飞控算法的开发、编译和下载。
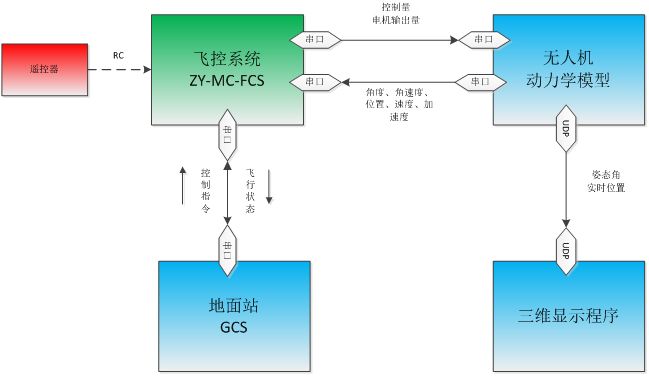
2.7. 仿真环境
提供基于多旋翼无人机飞控硬件的硬件在环的仿真开发。用户开发完飞控算法后,可基于硬件在环的仿真对算法的正确性进行验证,这样可极大的提高开发的效率,防止由于算法问题导致飞机损坏的问题。
(2)飞控程序直接运行在飞控计算机上
(3)接入真实的遥控器
(6)三维模拟程序实时显示飞机的姿态和位置
(7)地面站实时显示飞机的轨迹
1)提供飞控软件源代码
3)提供硬件在环路仿真源代码
4)提供视觉处理平台基础开发环境
























 粤公网安备 44010602004358号
粤公网安备 44010602004358号