
山东本森智能装备
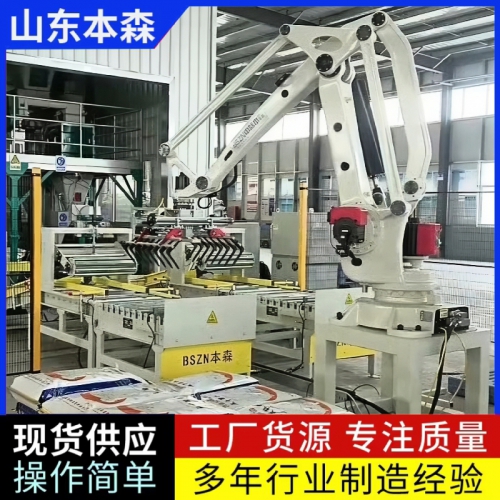
混合饲料搬运本森关节码垛机械手是一种基于多关节工业机器人技术的自动化设备,专为饲料、粮食等袋装物料的搬运与码垛设计。其核心通过机械臂模拟人类手臂动作,实现抓取、搬运、堆叠等全流程自动化,适用于不同规格、形状的饲料袋,是高端智能化码垛解决方案的典型代表。
混合饲料搬运本森关节码垛机械手以“感知-决策-执行”为核心工作逻辑:
1.感知:通过传感器(如光电传感器、视觉系统)实时识别饲料袋的位置、姿态及尺寸信息,确保精准抓取。
2.决策:控制系统根据物料信息与预设程序,计算最优抓取路径与码垛策略,动态调整机械臂动作参数。
3.执行:机械臂各关节(通常为6轴)协同运动,末端执行器(如夹爪、吸盘)完成抓取、搬运至目标位置,并微调对齐形成稳定垛型。其多关节设计赋予机械臂三维空间复杂路径规划能力,可适应不同堆叠模式与货盘尺寸,确保高效、精准作业。
1.高效精准:机械臂响应速度快,重复定位精度达±0.2mm至±0.5mm,显著提升码垛效率,减少因位置误差导致的停机调整与产品破损。
2.灵活适应:支持多规格饲料袋(不同重量、尺寸)的快速切换,末端执行器可定制化配置,满足多样化生产需求。
3.智能集成:配备用户友好编程界面与离线编程软件,支持与MES、WMS等系统无缝对接,实现生产计划自动调度、实时监控与故障预警。
4.稳定耐用:采用防尘、防水、抗冲击设计,可在冷库、高温车间等严苛环境稳定运行,降低维护成本与停机风险。
5.成本优化:替代人工完成重复性劳动,降低人力成本与工伤风险,同时通过标准化作业提升产品质量一致性。
1.饲料生产:在饲料包装线末端,机械手自动抓取成品袋,按预设模式堆叠至托盘,实现仓库自动入库与出库管理。
2.物流仓储:在物流中心,机械手与输送线、叉车协同,完成饲料袋的快速分拣与码垛,提升仓储空间利用率。
3.化工行业:针对化肥、塑料颗粒等袋装化工原料,机械手提供安全高效的码垛方案,避免人工操作风险。
4.食品加工:在面粉、米面等袋装食品生产线中,机械手实现自动化搬运与堆叠,助力现代化、智能化生产流程升级。


















 粤公网安备 44010602004358号
粤公网安备 44010602004358号